Rasen Roboter für ARDUINO Microcomputer
Rasen Roboter MR2 Projekt
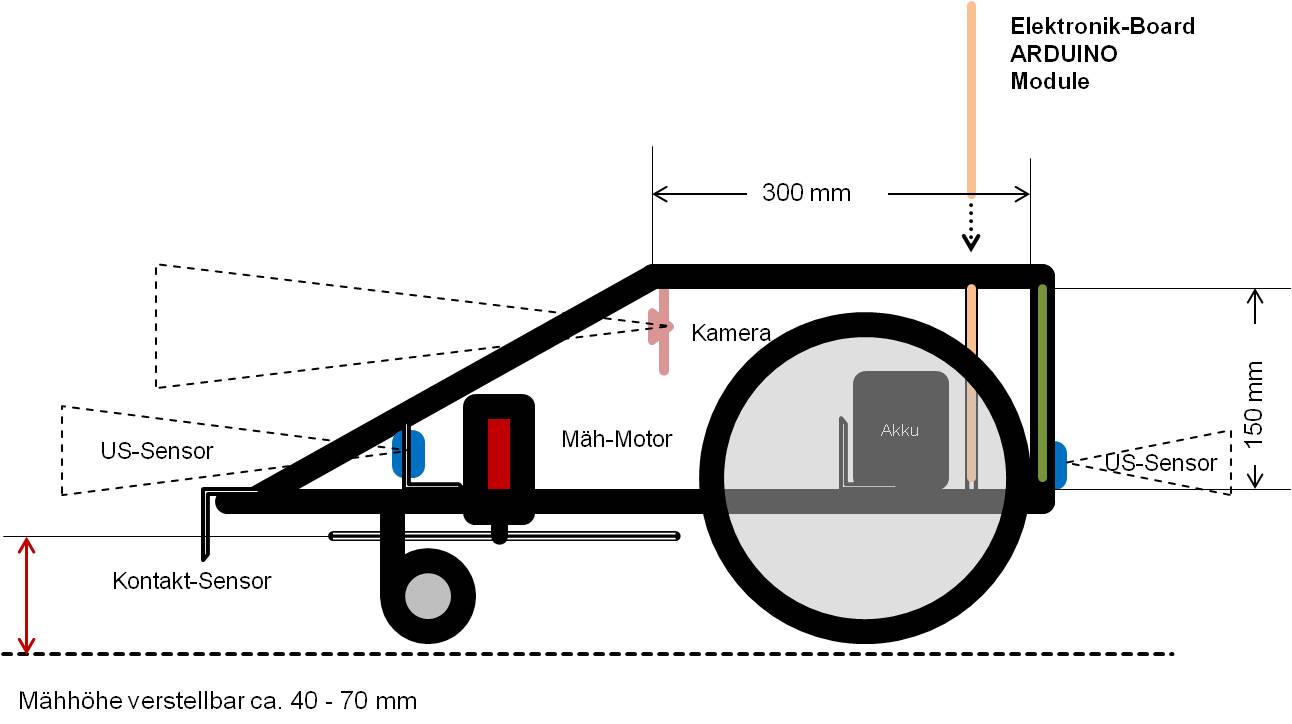
Mechanik
Folgende Informationen sind als PDFs vorhanden:
 Mechanik Details (PDF)
Mechanik und Elektronik (PDF)
Mechanik Radantrieb (PDF)
Mechanik Mäh-Motor(PDF)
Mechanik Kontakt Schalter vorne (PDF)
Mechanik Details (PDF)
Mechanik und Elektronik (PDF)
Mechanik Radantrieb (PDF)
Mechanik Mäh-Motor(PDF)
Mechanik Kontakt Schalter vorne (PDF)
Elektrik und Verdrahtung
Hauptpunkte für die Elektrik und Elektronik sind
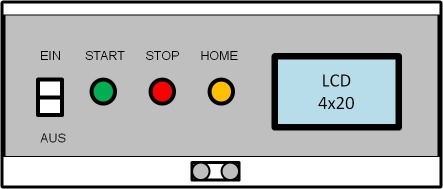
- Bedienfeld
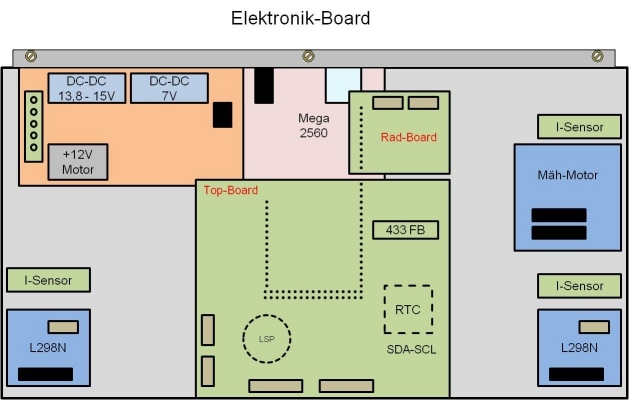
- Elektronikboard
- Elektronik-Module
- Verdrahtung
Das Bedienfeld enthält den Hauptschalter, die Bedientaster und ein LCD-Display mit 4x20 Zeichen. Das Elektronikboard enthält die komplette Elektronik bis auf die Sensoren die vorne und hinten am Roboter angebracht werden müssen. Die Verdrahtung verbindet das Elektronikboard mit dem Bedienfeld, dem Akku und den Sensoren.
Elektronik
Die Elektronik wurde aus preiswerten und fertigen Modulen aufgebaut. Es wird damit nur eine eigene Leiterplatte benötigt, die das Arduino-Board mit den Module über Steckverbindungen verbinden kann. Um einen, auch mechanisch, sicheren Anschluß zu gewährleisten ist das sog. Top-Board notwendig. Es werden nur Standard- Steckverbindungen verwendet die 3, 4 oder 10 pol sind. Alle Module sind auf dem Elektronik-Board
untergebracht. Es kann leicht über die Steckverbindungen getrennt werden. Das sog. Top-Board wurde in der Entwicklungsphase per Hand verdrahtet, später wird diese als fertige Leiterplatte z.V. stehen. Das Top-Board enthält auch etwas spezielle Elektronik: so ist das RTC (Uhrzeit) Modul, einen akustische Signalisierung und der 433Mhz Empfänger hier untergebracht.Optional kann auch eine Bluetooth-Modul angeschlossxen werden. Alle unten aufgeführten Module sind im Handel leicht und kostengünstig zu bekommen.
Einige Schaltbilder finden sie hier
Elektronik Module (PDF)
Elektronik Schaltbilder (PDF)
Elektronik Pin Layout des Mega2560 (PDF)
Die Fernbedienung
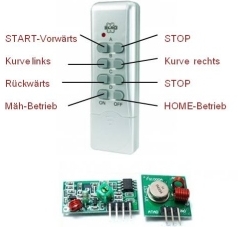
Selbstverständlich fährt der Roboter völlig autark und nur über seine Sensoren gesteuert. Über eine Fernbedienung kann man jedoch zu jeder Zeit den Roboter Starten, Stoppen und komplett von Hand steuern. Es wird eine Funkfernbedienung verwenden, die sehr preiswert und zuverlässig ist. Der FB-Sender und Empfänger arbeiten im 433 Mhz Band. Die Reichweite beträgt ca. 10 Meter.
Mann kann sich auch für eine Fernbedieung über Bluetooth und Smartphone entscheiden. Hierzu wird ein Bluetooth-Modul an den Mega angekoppelt. Die Steuerung erfolgt über eine spezielle App. Beide Varianten sind in der Software enthalten. Der Vorteil ist, man kann verschiedene wichtige Parameter des Roboters übertragen und anzeigen.
Elektronik-Module
Folgende Module werden, für die Grundausstattung eines Rasen Roboter benötigt:
- 3x Ultraschall-Sensor HC-SR04
- 1x RTC- Modul mit RAM
- 1x DC-DC-Wandler LM2596S
- 1x MotorEndstufe PWM 10A
- 2x MotorBrücke L298N
- 1x 433 MHz Receiver für FB
- 1x LCD Display I2C 4x20
- 2x Strom-Sensor ACS712 10A
- 1x Strom-Sensor ACS712 5A
- und ein ARDUINO Mega 2560
- optional: Bluetooth-Modul
Hier sind alle verwendeten
Elektronik Module (PDF)
Software
Download der aktuellen Arduino Software über ARDUINO.cc
Die MR2-Software wird auf der Basis der Arduino Entwicklungs-Oberfläche entwickelt. Diese ist zwar eine eingeschränkte, aber ausreichende, (C) Programmiersprache (Arduino-Sketch) gegenüber z.B. C++. Die Software für den Rasen-Robot befindet sich noch in der Entwicklung. Das Fahrprogramm zum Mäh-Betrieb d.h. Kollisionsvermeidung und das Umfahren von Hindernissen ist fertig und funktionsfähig. Auch das Fahren mit der Fernsteuerung ist fertig. In der Testphase werden auch alle in Frage kommenden Software-Libraries (Arduino) zum Steuern der verschiedenen Module auf Verwendbarkeit getestet.
Verwendete Libraries:
#include avr/pgmspace.h
#include <SPI.h&
#include <stdarg.h
#include <stdio.h
#include <Time.h
#include <EEPROM.h
#include <Wire.h
#include <LiquidCrystal_I2C.h
#include <NewPing.h
#include <DS1307new.h
#include <RemoteReceiver.h
eigene Libraries:
#include MR2Pmotor.h
Die komplette Software kann ich gerne z.V. stellen. Bei Interesse an diesem Projekt bitte ich um eine
EMail